SWExecStandard
Introduction
The SWExecStandard is a ready RTDB based application with IO-Handlers for some hardware boards. The version you have downloaded has IO-Handlers for:
- K8055 (see www.velleman.eu/ot/de/product/view/?id=351346)
- AVRNET (see www.pollin.de/shop/downloads/D810058B.PDF).
The installation package contains also the monitor SWMon that allows you to display the hardware inputs and change the hardware outputs. In addition it contains a specification Example that demonstrates the possibility of the StateWORKS specification tools: to create application without writing a single line of code. If you want to try a creation of your own application you just download the StateWORKS Studio LE.
Installation
The software package installs itself if started by a click on the downloaded file SWApplicationLE_7.2.exe. The default installation directory is C:\Programme\SWSoftware\StateWORKS Application LE 7.2.
You may change it during the installation.
Starting the application
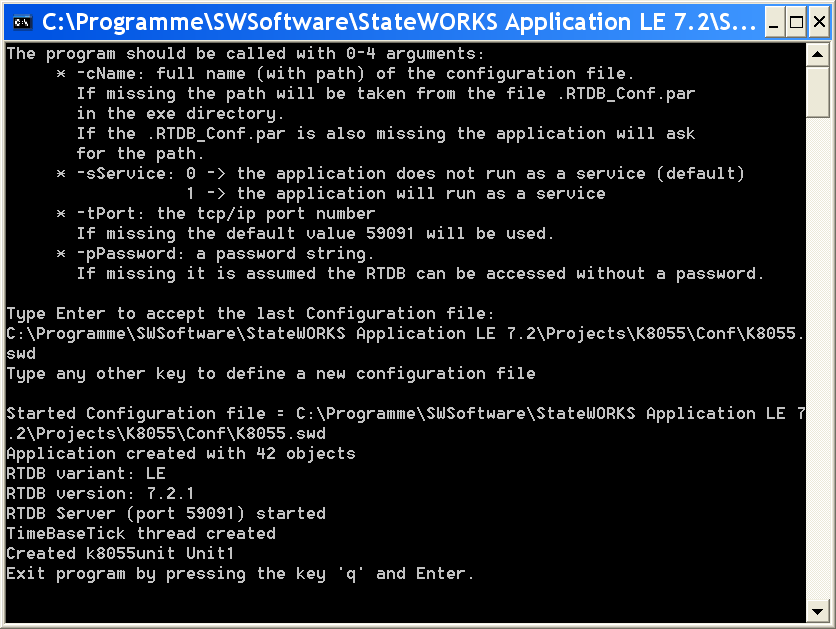
In the installation directory you find the application program SWExecStandard.exe. On starting it you will be asked to supply the configuration file. Depending on the board used you should enter the path to:
- ...Projects\AVRNET\Conf\AVRNET.swd
- ...Projects\K8055\Conf\K8055.swd
On the next start the program will suggest to use the last configuration file. You may accept it or enter a new configuration path. The screen is shown in Figure 1.
Note: In case of AVRNET program you may get problems with IP address. The address in the project has been set to 192.168.2.90. In principle any changes to the specification files should be done using StateWORKS Studio. If you want to test the program before installing StateWORKS Studio you can change the address by hand: open the file AVRNET.swd in a text editor and change the IP address which you find somewhere at the end of the file.
Monitoring Inputs and Outputs
To display and change hardware signals you have to start the SWMon program which is in the same installation directory.
On a start accept the default Host and Port values and leave the Password entry empty (assuming that you have not defined the password while starting the SWExecStandard).
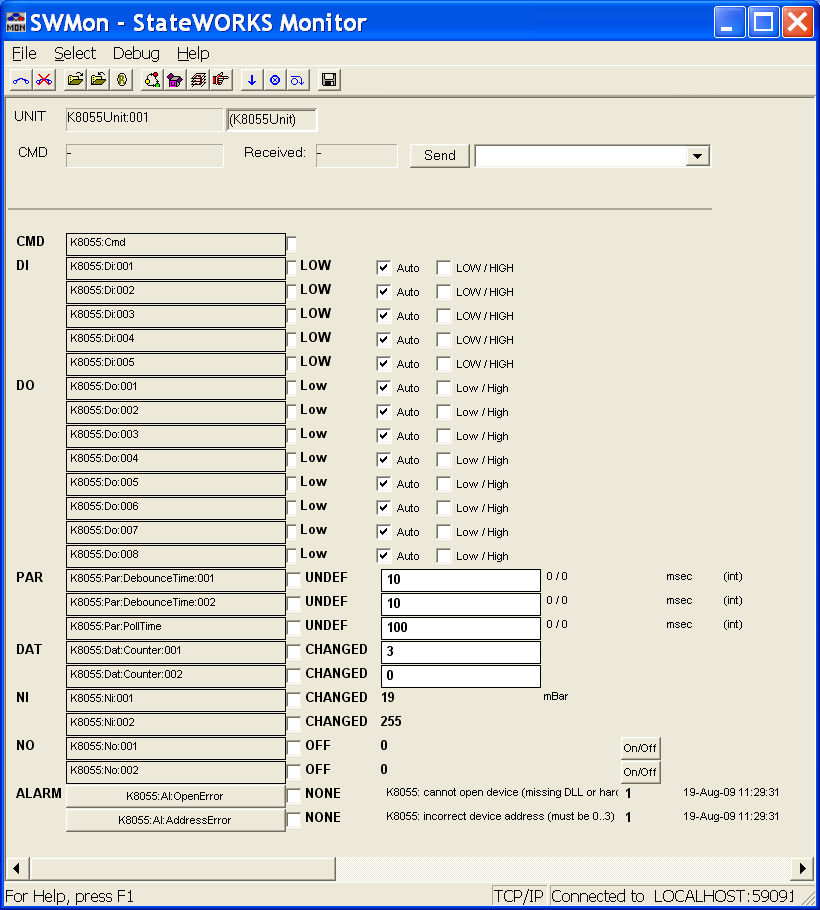
With Select/Unit or using the corresponding icon open the SelectUnit dialog windows where you choose the Unit present there (K8055Unit:001 or AVRNETUnit:001) and close it with OK. You should see all inputs and outputs of the board used (for instance Figure 2 shows all object of the IO-Handler for K8055 board). If the board does not exists yet (is not connected) a corresponding alarm will be active.
If you choose VFSM view (Select/VFSM or corresponding icon) you will see all objects that are used in the Example.
The USER view (Select/Objects) displays all objects used in the specification.
If the board is connected its input values (DI, NI) are displayed and you can set its outputs (DO, NO) using the service (force) mode. If the board is not connected the input values becomes UNKNOWN (DI) or UNDEF (NI) and a corresponding alarm is generated. You can connect / disconnected the board at any time; the system detects the changes and behaves appropriately.
RTDB objects
Actually you see in SWMon RTDB objects (see [1] , technical note and descriptions at w.stwww.stateworks.com) that were used while specifying the IO-Unit for the IO-Handler. That means you see not only the inputs and outputs available on the board but also objects that are required for proper functioning and supervision of the IO-Handler. Especially, you see there a few alarms and parameters (see the description of the IO-Units).P STYLE="margin-bottom: 0cm">
K8055 IO-Unit
The Unit specifies the interface between the K8055 board signals and RTDB objects. It defines objects shown in the table below:
|
Object type |
Name (K8055 unit) |
RTDB object |
|
Digital input DI |
Di_1 Di_2 Di_3 Di_4 |
K8055:Di:001 K8055:Di:002 K8055:Di:003 K8055:Di:004 |
|
Digital output DO |
Do_1 Do_2 Do_3 Do_4 Do_5 Do_6 Do_7 Do_8 |
K8055:Do:001 K8055:Do:002 K8055:Do:003 K8055:Do:004 K8055:Do:005 K8055:Do:006 K8055:Do:007 K8055:Do:008 |
|
Numerical input NI |
Ni_1 Ni_2 |
K8055:Ni:001 K8055:Ni:002 |
|
Numerical input NO |
No_1 No_2 |
K8055:Ni:001 K8055:Ni:002 |
|
Data DAT |
Dat_Counter1 Dat_Counter2 |
K8055:Dat:Counter:001 K8055:Dat:Counter:002 |
|
Command CMD |
Cmd |
K8055:Cmd |
|
Alarm AL |
Al_CommError Al_AddressError |
K8055:Al:AlaCommError K8055:Al:AlaAddressError |
|
Parameter PAR |
Par_DebounceTime1 Par_DebounceTime2 Par PollingTime |
K8055:Par:DebounceTime1 K8055:Par:DebounceTime2 K8055:Par:PollTime |
Several objects are IO-Unit specific ones:
- Cmd is a command send to the board and could be:
- AnalogClearAll_Ao 4
- AnalogSetAll_Ao 3
- CloseDevice 22
- CounterResetAll 11
- CounterReset_1 12
- CounterReset_2 13
- CounterSetDebounceTime_1 14
- CounterSetDebounceTime_2 15
- DigitalClearAll_Do 2
- DigitalSetAll_Do 1
- OpenDevice 21
- OpenFirstDevice 23
- AlaCommError is an alarm generated if the communication with the K8055 board is down.
- Al_AddressError signals an erroneous physical address of the board (must be 0...3).
- Par_DebounceTime1 and Par_DebounceTime2 are debounce time values for inputs Di_1 and Di_2 that are counted correspondingly by Dat_Counter1 and Dat_Counter2.
- ParPollTime defines the value of the polling time loop which queries the K8055 input signals. It can be changed at any time in the SWMon.
AVRNET IO-Unit
The Unit specifies the interface between The AVRNET board signals and RTDB objects. It defines objects shown in the table below:
|
Object type |
Name (AVRNET unit) |
RTDB object |
|
Digital input DI |
DI1 DI2 DI3 DI4 |
AVRNET:Di:001 AVRNET:Di:002 AVRNET:Di:003 AVRNET:Di:004 |
|
Digital output DO |
DO1 DO2 DO3 DO4 DO5 DO6 DO7 DO8 |
AVRNET:Do:001 AVRNET:Do:002 AVRNET:Do:003 AVRNET:Do:004 AVRNET:Do:005 AVRNET:Do:006 AVRNET:Do:007 AVRNET:Do:008 |
|
Numerical input NI |
NI1 NI2 NI3 NI4 |
AVRNET:Ni:001 AVRNET:Ni:002 AVRNET:Ni:003 AVRNET:Ni:004 |
|
Alarm AL |
AlaCommError |
AVRNET:Al:AlaCommError |
|
Parameter PAR |
ParPollTime |
AVRNET:Par:PollTime |
Two objects are IO-Unit specific objects:
- AlaCommError is an alarm generated if the communication with the AVRNET board is down.
- ParPollTime defines the value of the polling time loop which queries the AVRNET input signals. It can be changed at any time in the SWMon.
Example
The Example demonstrates a typical control performed by starting a device and supervision of a controlled value (pressure). We assume that the device is switched on by setting a digital input HIGH and the SetPressureValue is a voltage on an analog (numerical) output (representing the required pressure value). The device supplies a digital signal HIGH to a digital input if switched on and a voltage (proportional to a actual pressure value) to the analog (numerical) input. The use of board inputs and output is shown in the table below. Note that the AVRNET does not have numerical outputs; hence the SetPressureValue goes just to nirvana.
|
K8055 |
AVRNET |
|||
|
Board |
Unit |
Board |
Unit |
|
|
Digital input DI (Start acknowledgement) |
Inp1 |
K8055:Di:001 |
Pin an J3: 10 PA0 (ADC0) |
AVRNET:Di:001 |
|
Digital output DO (Device On/Off) |
01 |
K8055:Do:001 |
Pin an J3: 2 PC0 (SCL) |
AVRNET:Do:001 |
|
Numerical input NI (Pressure) |
A1 |
K8055:Ni:001 |
EXT.: 8 PB3 (0C0/AIN1) |
AVRNET:Ni:001 |
|
Numerical output NO (SetPressureValue) |
DAC1 |
K8055:No:001 |
- |
- |
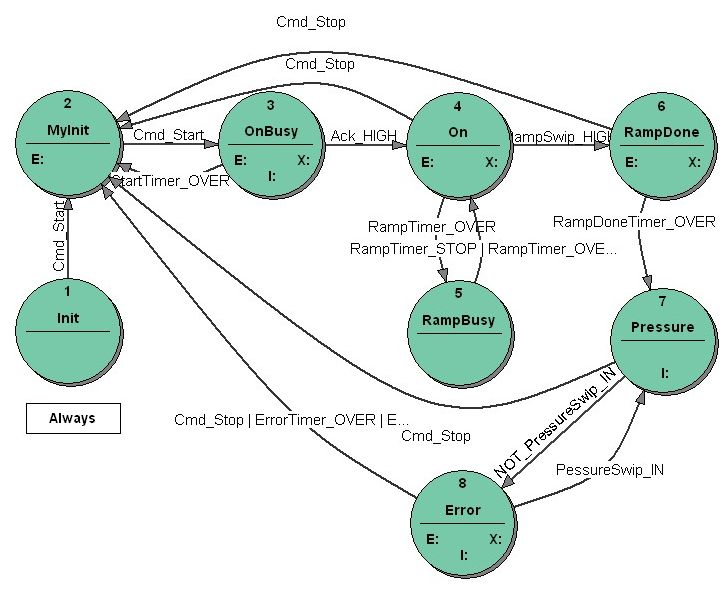
There are 3 control phases:
- The first phase begins with the command Cmd_Start which starts the device. If the device acknowledges its start by setting the digital input to HIGH the state machine passes to the second phase. The first phase is supervised by a timer which timeout value is equal to 3 sec. If the timeout elapses before the device acknowledges its start the state machine should terminate the start-up.
- In the second phase a ramp of the SetPressureValue (required pressure value) is to be generated. The SetPressureValue should increase in 100 steps from 0 to 4 V. If the SetPressureValue reaches its nominal value we should wait 5 seconds to be sure that the pressure has reached its required value and the third phase should begin.
- The third phase is a supervision of the pressure value which should stay in between maximum and minimum limits. If the pressure leaves the band an alarm should be generated. If this erroneous situation last more than 3 seconds the state machine should stop the device. On the other hand the number of pressure errors is limited to 4. A non-compliance to this requirement should stop the device. Every pressure error-free minute should reduce the number of errors done by one.
At any time the Cmd_Stop should switch off the device and set the SetPressureValue to 0.
The state transition diagram of the state machine Example that does the control is shown in Figure 3. The detailed specification can be found in the document ...\Projects\AVRNET\XmlExample.xml. The specification has been done using StateWORKS Studio which free LE edition can be downloaded from www.stateworks.com/product/download/.
References
1. Wagner, F. et al., Modeling
Software with Finite State Machines – A Practical Approach,
Auerbach Publications, 2006.